Research
Bio-integrated Robotics group works at the interface of robotics, microtechnology and bioengineering, developing soft micro-robots inspired by nature for healthcare applications. The overarching research theme is bionic cellular and tissue robots for size-matched and spatiotemporally resolved physical and biochemical manipulation of cells and tissues, with applications in in vitro disease modeling, therapeutic cell and tissue manufacturing and targeted drug delivery.
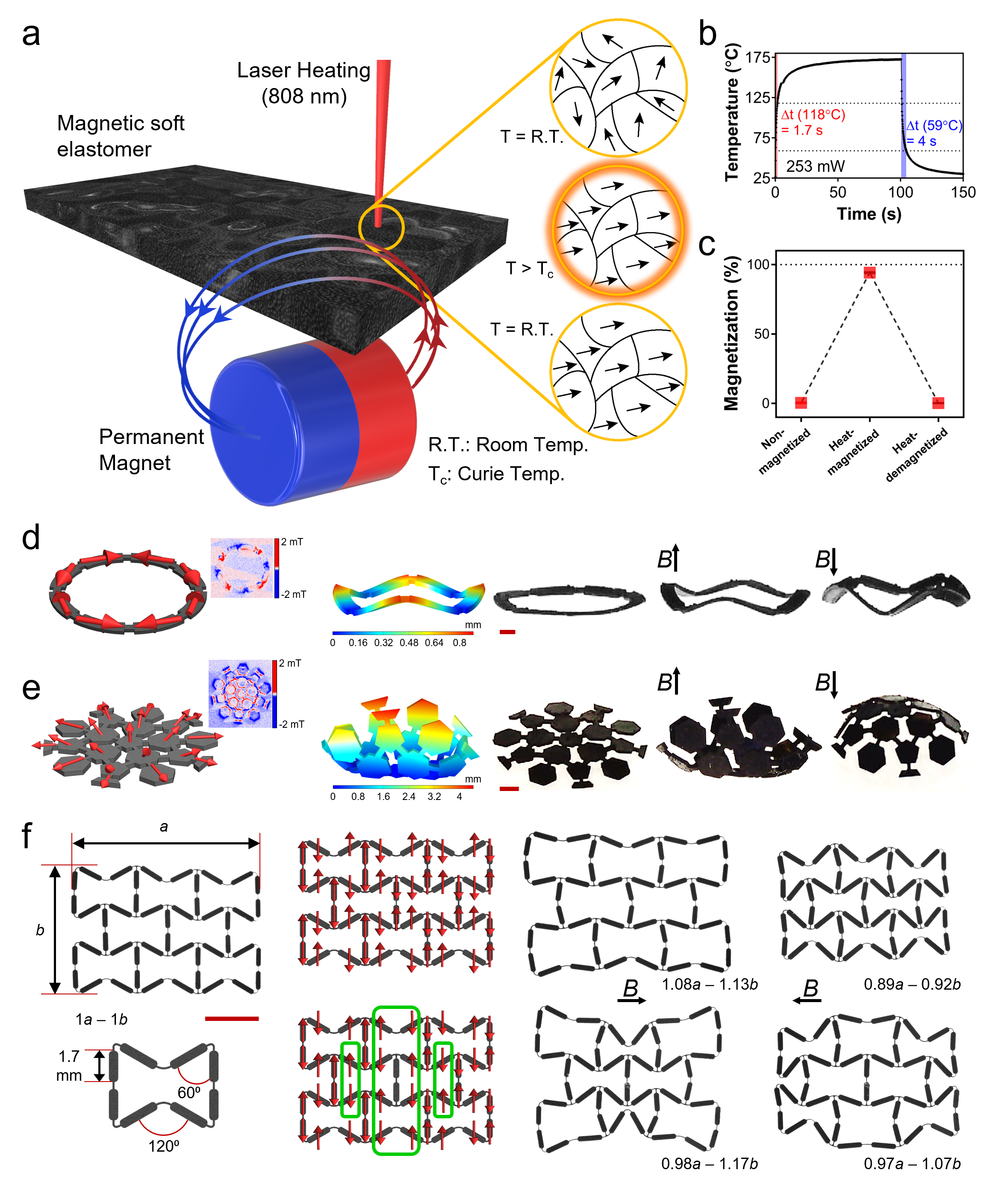
Programmable Magnetic Soft Materials: The capability to encode distributed magnetization orientation in a continuous soft material enables programming local deformation instructions under external magnetic field. We have developed advanced, flexible strategies for design, fabrication, and programming of soft materials for creating soft structures and robots with complex shape-morphing and dynamic behaviors. Heat-assisted magnetic programming allows heating local domains (a-c) via a focused near-infrared laser above the Curie temperature of ferromagnetic particles embedded in soft materials, which then starts behaving as paramagnetic. Application of small external fields at this elevated temperature and during cooling enables encoding desired magnetization directions, which generates distributed magnetic torques and programmable shape-morphing behavior in magnetic soft structures (d – f).
Related publications:
Microporous Magnetic Soft Materials with Programmable Locomotion and On-Demand Liquid Cargo Release
Magnetic Programming of Soft Materials Using Digitally Processed Laser Heating
Data-driven design of shape-programmable magnetic soft materials
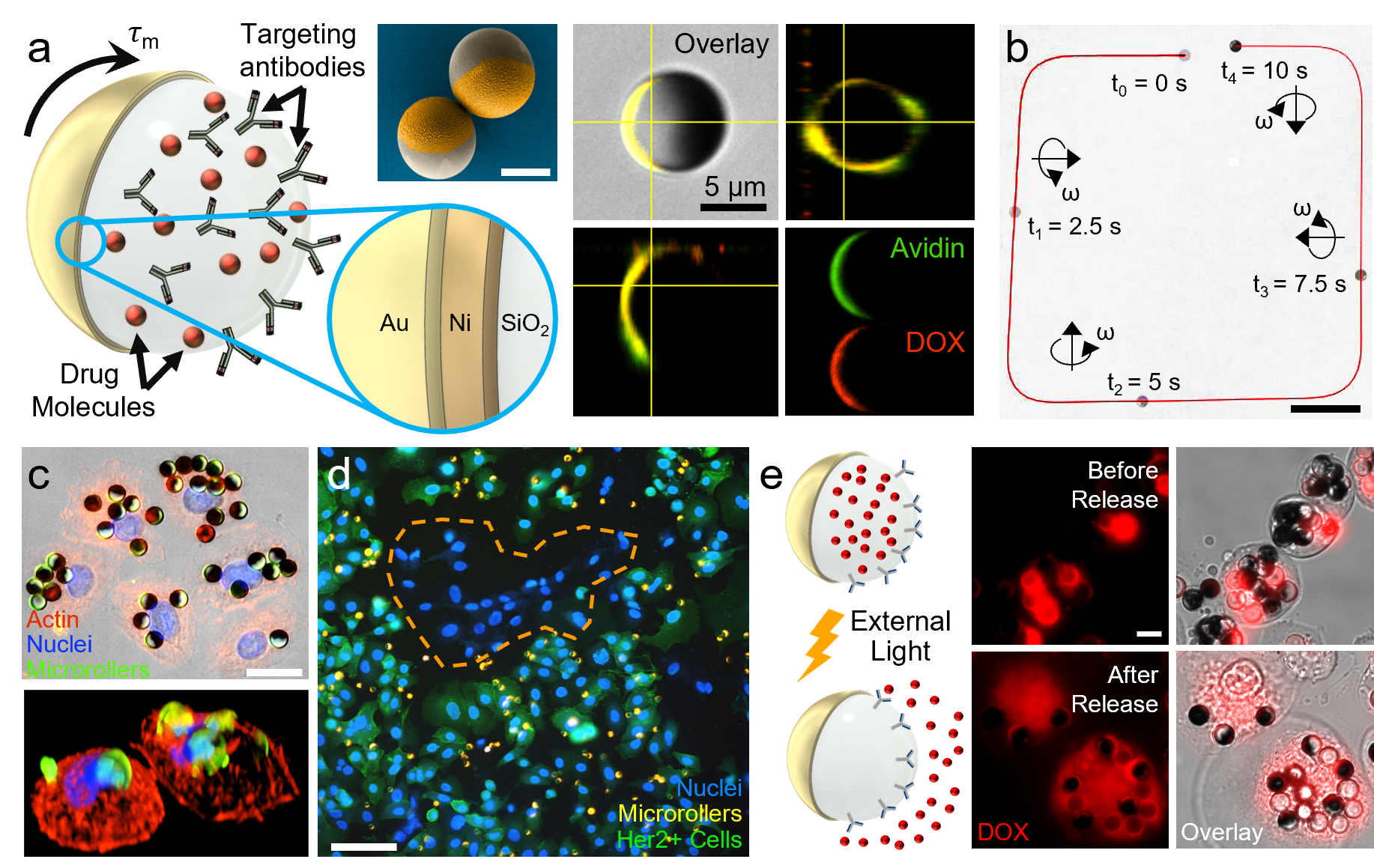
Magnetic Microrobots: We have developed cell-sized microrobots composed of a silica particle half-coated with Ni and Au for magnetic actuation. Remaining silica surface can be decorated with antibodies and drug molecules for targeted delivery (a). Rotating magnetic fields enable rolling locomotion of microrobots (b). Specific cells can be targeted via surface-bound antibodies during locomotion of microrollers on cellular monolayers, allowing active search of target cells (c, d). Drug molecules can be released on-demand triggered by external light stimuli for local delivery (e).
Related publications:
Reduced rotational flows enable the translation of surface-rolling microrobots in confined spaces
Reduced rotational flows enable the translation of surface-rolling microrobots in confined spaces
Multifunctional surface microrollers for targeted cargo delivery in physiological blood flow
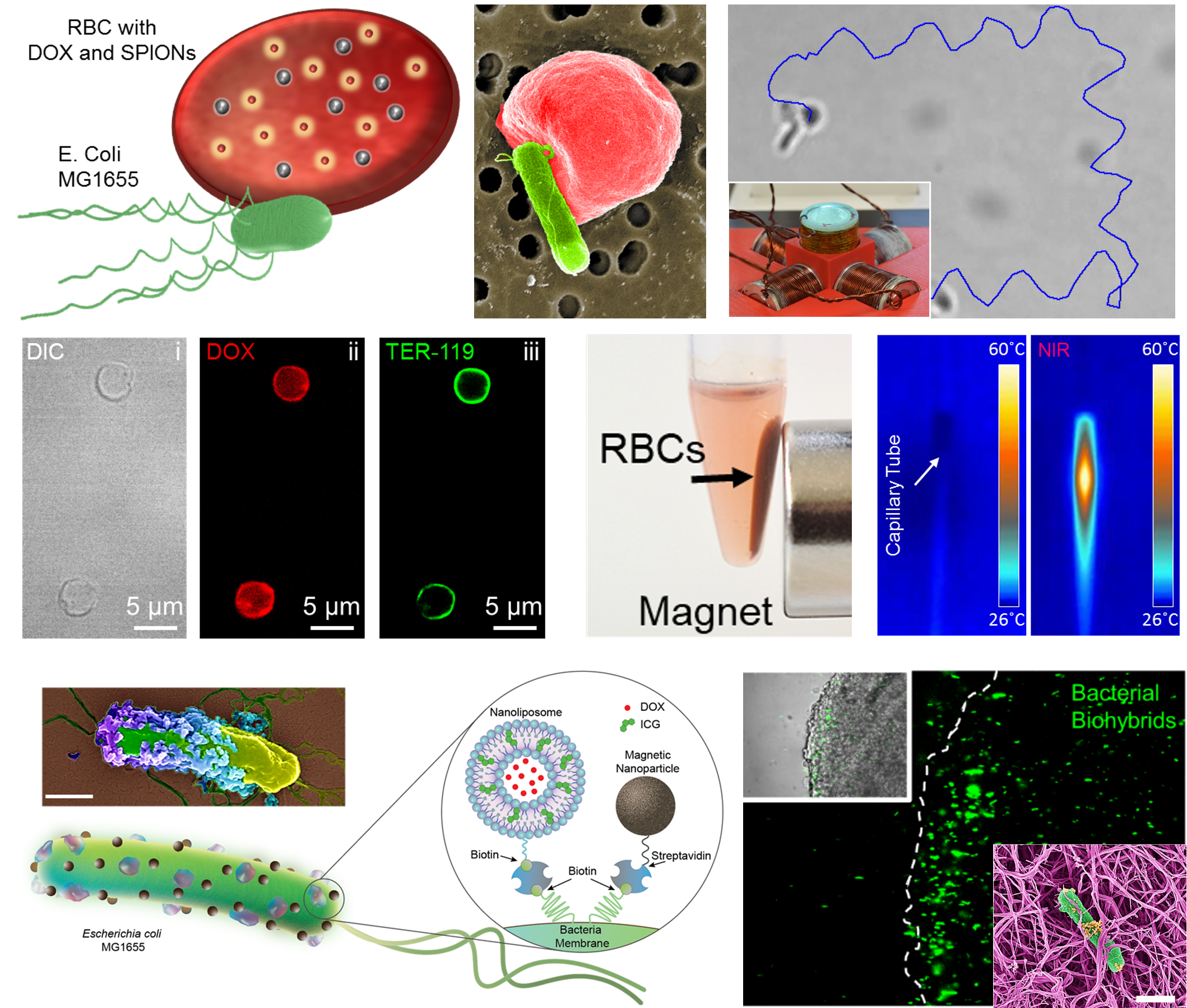
Biohybrid Microrobots: Intelligent microrobots can be also created by hybridizing biological microorganisms (e.g., bacteria, cells) with synthetic constructs, forming biohybrid microrobots/swimmers. We have developed soft red blood cell (RBC) microswimmers composed of bioengineered motile bacteria and RBCs, loaded with drug molecules and magnetic nanoparticles, providing autonomous propulsion, non-tethered steering, efficient cargo encapsulation, active deformation of the swimmers through narrow gaps, and on-demand termination of bacteria via near-infrared light triggered hyperthermia (top two rows). We further developed biohybrid swimmers decorated with magnetic and lipid nanoparticles carrying therapeutic loads with enhanced penetration into biological 3D matrices under magnetic fields (bottom row).
Related publications:
Microalga-Powered Microswimmers toward Active Cargo Delivery
Soft erythrocyte-based bacterial microswimmers for cargo delivery
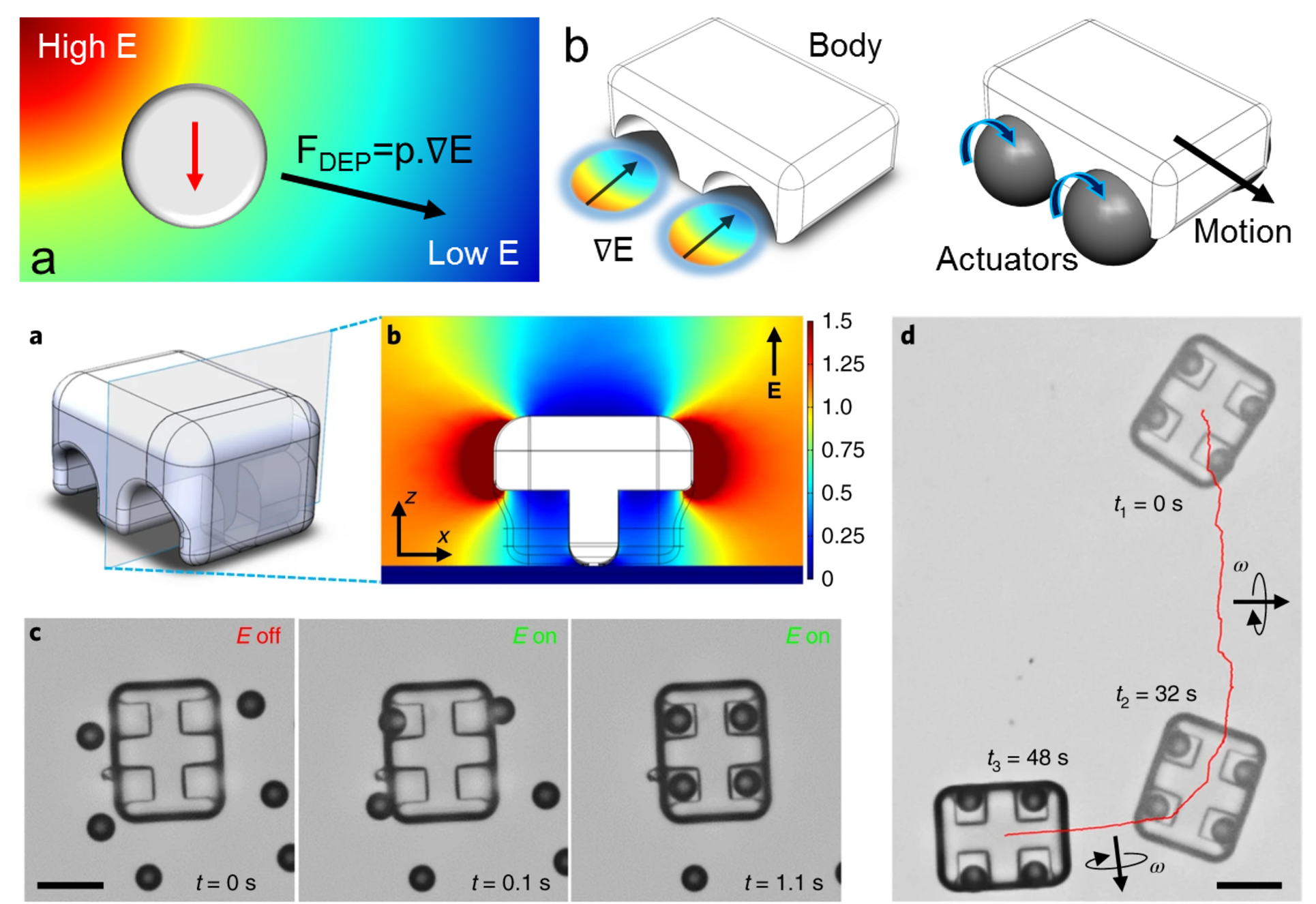
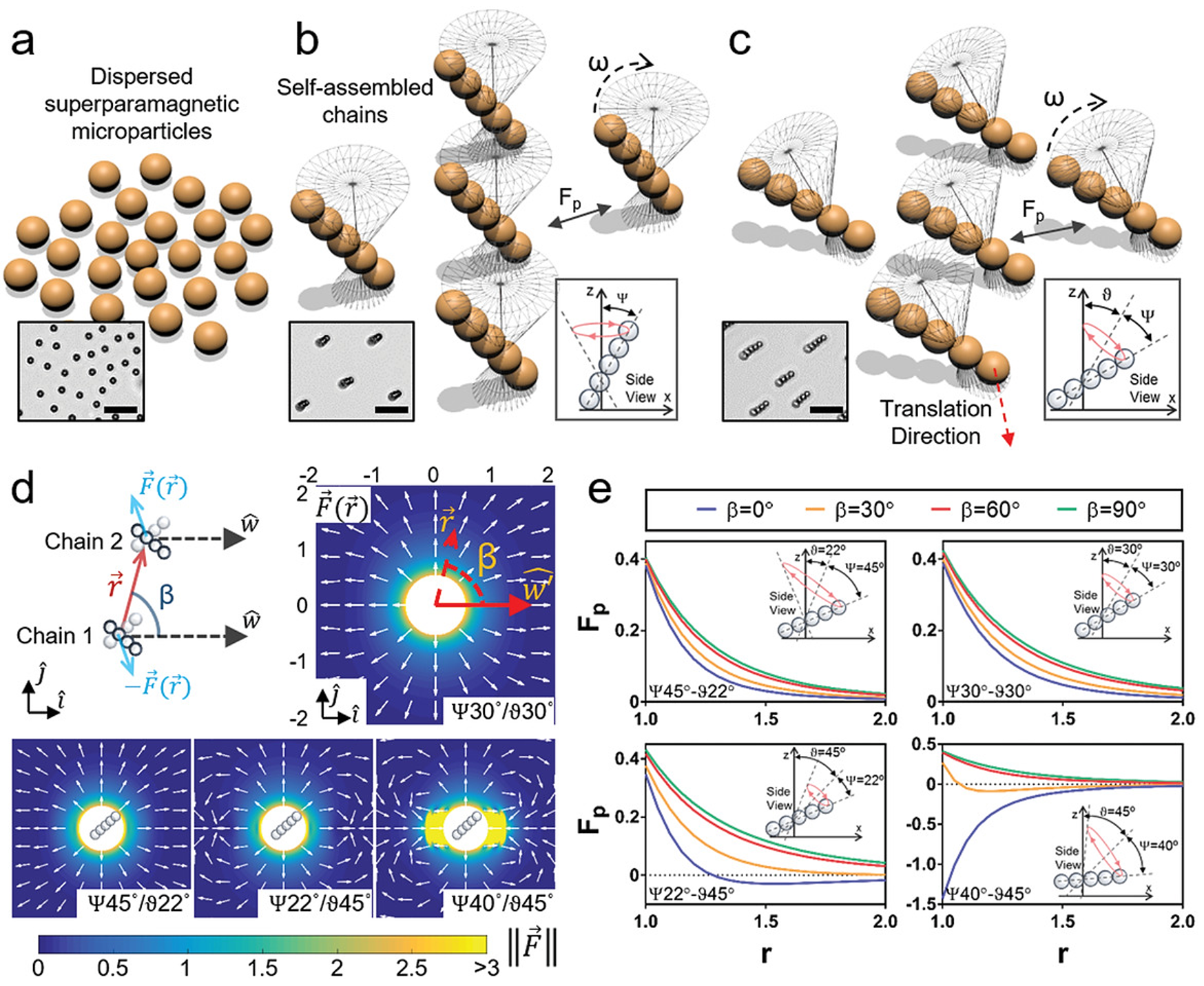
Microrobot Assemblies and Swarms: Controlling physical interactions between microagents is crucial for assembling compound microrobots/machines and building microrobot groups and swarms. We have developed a size-selective directed assembly process for building mobile compound microrobots under electric fields, which permits extensive control over the spatial organization of sub-units forming the assembly. In this process, dielectrophoretic (DEP) forces were used for encoded assembly of functional components by precisely controlling the distribution of electric field gradients generated around a body (structural sub-unit) through modulation of its 3D geometry. We showed assembly of various mobile microrobots powered by multiple magnetic and self-propelled actuators (motor sub-units).
Related publications:
Cohesive self-organization of mobile microrobotic swarms
Shape-encoded dynamic assembly of mobile micromachines
Programmable Collective Behavior in Dynamically Self-Assembled Mobile Microrobotic Swarms